本文围绕机器人、操作员、协作、操作、手动、安全、分离、速度、工作、工件有关词展开编写的关于协作机器人进行钣金加工——钣金自动化生产线相关文章,仅供大家了解学习。
近年来,合作机器人(cobot)在自动化领域掀起了一股热潮。
很多人认为合作机器人系统只有一个解决方案,就是专门的非工业机器人。好消息是,实现协作系统实际上有很多选择。事实上,大多数传统机器人可以通过额外的安全设备和适当的集成来“合作”。让我们看看协作机器人如何帮助我们处理钣金加工。
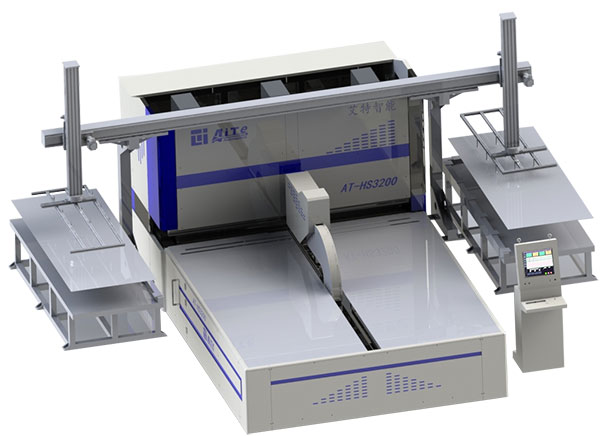
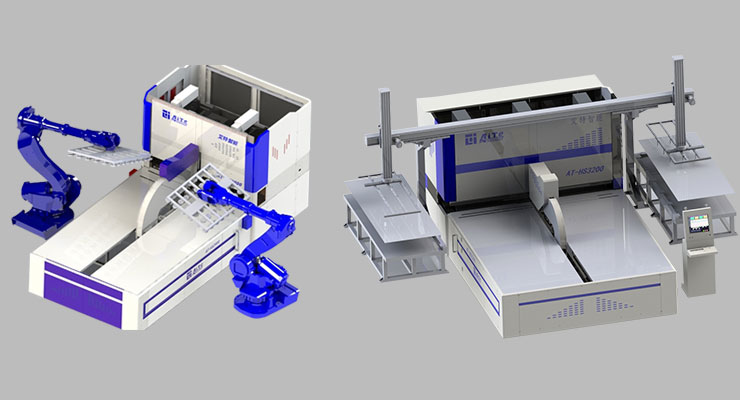
自动钣金生产线
协作机器人可以以多种方式操作。
根据2012年发布的ISO 10218-1安全标准,有四种不同类型的合作机器人操作:
安全等级监控停机 手动引导 速度和分离监测 通过固有设计限制功率和力安全水平监控关闭
协作工作空间是一个共享的工作空间,机器人和操作员都可以在其中执行任务。
当操作者处于“协同工作空间”时,“安全级别监控停止”系统将不允许机器人移动,但机器人驾驶员可以保持电力。
对于这种类型的操作,标准工业机器人可以在协同工作空间中高速运行,而无需操作员,从而缩短周期时间。协作区域明确后,机器人无需操作者直接输入,即可自动启动和倒车。
安全级监控停堆操作的一个常见用途是手动装载和卸载站。在这种情况下,操作员可以手动将工件装载到机器人的工具箱中,或者在机器人上检查工件。
在机器人完成加工和卸载工件后,允许操作者定期检查工件。为了实现这些类型的应用,光幕和激光保护可以代替围栏。
人工引导
“手动引导”操作允许机器人通过手动操作设备的操作员的直接输入来移动。
当操作员进入协作工作区时,机器人将保持在安全级别的监控停止状态,直到操作员通过激活开关来启动手动引导装置。
很多时候,这些设备被用作智能举升辅助设备,因为它们比普通举升辅助设备更容易操作,但它们也可以在没有操作员的情况下自主运行。
手动导航创造了一种更简单的方式来驱动机器人或“教授”加工过程。
以及速度和分离监控。
“速度和分离监控”,也称为“无围栏”机器人系统。在该系统中,只要操作者与机器人保持预定的保护距离,机器人和操作者就可以在协同工作空间中同时移动。
安全等级的激光区域扫描仪通常监控这种类型的协作应用。
如果操作者违反了分离距离,机器人将停止,直到人离开机器人。一旦这个人离开,机器人可以自主地继续这个过程。
根据机器人的速度、操作者的速度和系统(包括机器人和安全装置)的反应时间,通过计算确定分离距离。机器人移动得越快,它需要的间隔距离就越大。操作者突破间隔距离越频繁,机器人越容易保持零速度(静止)。
通过固有的设计或控制来限制力量。
“通过固有的设计或控制来限制功率和力”协同操作需要特殊的机器人。这个机器人设计有内置的电力或力反馈,允许它检测与人的接触。这是zui受欢迎的机器人协作类型,对于要求操作员与机器人处于同一工作空间的应用来说,这是理想的选择。
它需要zui广泛的风险评估,因为当操作者停留在机器人的范围内时,机器人应该能够继续其任务。因此,机器人的zui大速度将低于传统机器人。可用于机箱机柜生产线、自动桥架生产线、钣金仓储仓库等。
四个合作机器人操作中的每一个都允许人与机器人进行不同程度的互动。如果您想为您的钣金加工设备配备机器人或自动化设备,请立即联系。
推荐:高效自动化钣金生产线制造的6个成功因素
本文分享了机器人操作员相关于协作机器人进行钣金加工——钣金自动化生产线的文章资料,青岛艾特主营产品:智能柔性折弯机、柔性折弯中心、数控折弯机、折边机、翻边机、全自动柔性折弯机、数控冲床、数控转塔冲床。艾特柔性折弯中心可广泛应用于钢柜壳体领域(文件柜、工具柜、外护罩、电气柜、通讯柜、燃气柜、水表柜……)、厨具领域(冰箱、空调、灶具……)、家具、通风、制冷、净化、门业、装饰、电梯及其他相关的金属成型领域。